
日月光半導體股份有限公司
工作環境介紹
我所在的 SMDC 智慧製造發展中心 (Smart Manufacturing Development Center) 共分成三組,分別是AI Vision、Automation 以及 Data Analysis。我所在的AI部門是專注於將 AI 視覺檢測技術應用於製造、品質控制與使用人體姿態辨識管控 SOP 的部門。部門的工作範圍涵蓋了從數據處理、模型開發,到現場監測與工控系統整合等功能。

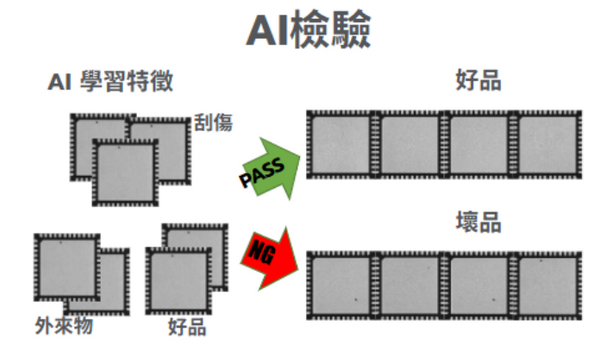
AI Vision
_edited.jpg)
專注於特徵深度學習,
開發高精度瑕疵檢驗模型

Automation
_edited.jpg)
實現無人化作業,
提升生產安全、品質與效率

Data Analysis
_edited.jpg)
處理大量、多樣、快速的
生產數據,提供即時洞察
工作詳述
我的實習工作內容主要分為兩部份:
A. 前期技術探索與學習經驗
這是實習初期進行的獨立技術探索任務,旨在快速熟悉工業界對 AI 視覺檢測的高精度要求與數據規範。
-
進入無塵室產線學習:
-
實際進入半導體製造的無塵室產線,觀察 Die Bond 與 Wire Bond 設備的運作流程。
-
學習晶片封裝過程中對瑕疵檢測的行業標準與高精度要求。
-
-
高精度數據標註執行:
-
針對 Die Bond/Wire Bond 的 AI 檢測基礎專案,負責執行標記工作。
-
累積對高解析度工業影像數據進行微小瑕疵標註的經驗,了數據品質對模型精準度的決定性影響。
-
B. 核心專案:籠車狀態即時偵測系統之開發
專案背景與目標: 此專案旨在透過電子圍籬,解決出貨部門的人員疏失。鑑於從 2023 年至 2025 年每年皆發生至少 1 件籠車掉落碼頭事件,導致封裝好的晶片損壞,造成鉅額損失,本系統的目標是透過電子圍籬(ROI 區域)偵測,即時辨識籠車是否進入警戒區,從而避免人員未注意而將其推下碼頭。
場域與硬體規劃: 專案實作場景位於碼頭區域。團隊在初期場勘中,詳細規劃了相機的架設位置,透過交叉拍攝以消除視覺死角,評估搭載NVIDIA Jetson AGX Orin 的 Edge Server 等硬體將放置於牆後電腦區。

階段一:技術準備與環境建置
在籠車專案啟動時,我的主要工作是進行環境設置與技術儲備
-
Linux 與 Edge 熟悉:
進行 AAEON Edge Server 的系統設定,學習並熟悉 Linux 系統下的權限管理、軟體安裝與虛擬環境配置(Conda/venv)。 -
深度學習框架與模型準備:
學習 YOLO 框架基礎知識,了解模型檔案結構與運作方式,並學習 PyTorch 中關於 GPU 裝置配置的基礎設定。
階段二:籠車資料集建構與品質管理
我的主要職責是執行數據轉化工作,以支持 RTX-5080 訓練主機的模型訓練:
-
影片幀提取工具實作:
-
協助開發 Python 工具,並負責測試與調試,確保該工具能支援根據精確時間或固定幀率進行影像取樣。
-
-
目標類別定義與標註執行:
-
負責使用 LabelImg 工具進行標註,輸出符合 YOLO 訓練的正規化座標格式,確保數據品質與多種標註形式的兼容性。
-
定義了需辨識的籠車樣式等共 13 個目標類別。
-




階段三:邊緣運算平台部署與性能優化
我在團隊設計的架構下,協助核心程式的實作與驗證:
-
模型加速與裝置配置:
確保將 Ultralytics YOLO 模型透過 TensorRT 加速。推論環節透過 FP32 轉 FP16 浮點數精度優化,將 AI 推論 FPS 從 10 提升至 15(約 50% 性能提升),以最大化 NVIDIA CUDA (GPU) 的運算效率,實現即時影像推論。 -
多程序平行化機制實作與驗證:
針對單一執行緒的性能瓶頸,我執行團隊提出的 multiprocessing 模組解決方案。實作並驗證將 RTSP 即時串流影像的擷取、偵測、顯示任務分離到獨立程序中的程式邏輯,成功實現「一對二」即時影像串流的穩定 AI 推論偵測。
階段四:電子圍籬演算法
-
籠車偵測: 取得偵測到的籠車位置資訊。
-
警戒區判斷:
判斷籠車是否進入預先設定的警戒區(ROI)。
判斷籠車偵測框的右下點是否進入警戒區,作為輔助精準判斷。 -
NG Criteria 判定: 執行量化判定邏輯,若 (籠車警戒區交集面積/籠車總面積>3%),則判為 NG。
-
異常處置: 一旦判斷為 NG,Edge Server 即透過 Modbus/TCP 協定向電控箱內置的 ADAM 模組發送指令。該模組隨即觸發聲光合一音量喇叭進行即時警示,從而避免人員將籠車推入危險區域。




實習期間完成之進度

技術探索與準備
完成 Die Bond/Wire Bond AI 檢測基礎學習,實際進入無塵室產線,並參與高精度數據標註執行。
完成 Edge Server 平台環境建置與技術儲備,熟悉 Linux 系統操作與 PyTorch/CUDA 運行環境。
邊緣運算性能
與部署
-
推論性能優化: 成功利用 TensorRT 與 FP16 精度優化,提升單路推論 FPS 達 50%,達到實時偵測幀率要求。
-
多路串流部署: 透過多程序(Multiprocessing)架構實作,穩定部署「一對二」RTSP 即時影像串流的 AI 推論系統。
數據與基礎架構
負責執行籠車專案訓練資料集的 LabelImg/isat 標註與品管工作。同步完成核心偵測應用程式的基礎架構(模型載入、GPU 裝置配置)的實作。
應用功能與
系統整合
協助實作電子圍籬 (ROI) 演算法。成功驗證 Edge Server 透過 Modbus/TCP 協定向 ADAM 工業 I/O 模組發送指令,完成 NG 判定與聲光警報器串接的系統整合和現場測試。
工作中扮演的角色
技術執行與實作:
在團隊的指導下,負責執行籠車專案核心偵測應用程式的程式碼實作、測試,並將 Multiprocessing、Tensor 加速等優化藍圖轉化為可運行的程式。
數據品質保證:
在兩次專案(DB/WB 檢測與籠車專案)中,負責資料集的執行標註與品管,並學習使用labelImg、isat 實例分割工具,確保模型能獲得高品質的輸入。
智慧巡檢結果審查 (Review): 負責智慧巡檢系統的結果審查工作(REVIEW)。審查 AI 抓出的結果,判斷是否為誤判,並將審查結果整理為圖表。這項工作是確保 AI 系統在現場部署後,能夠持續迭代優化、降低誤報率(False Positives)的關鍵反饋環節。